
Kontroler otomatis membandingkan nilai sebenarnya dari keluaran sistem secara keseluruhan (plant) dengan mengacu pada. masukan (nilai yang dikehendaki), menentukan penyimpangan, dan menghasilkan sinyal kontrol yang akan mengurangi penyimpangan yang akan menjadi nol atau nilai yang kecil. Cara bagaimana kontroler otomatis tersebut menghasilkan sinyal kontrol dinamakan aksi kontrol.
AKSI KONTROL DASAR
Aksi kontrol dasar yang digunakan dalam kontroler analog industri. Klasifikasi kontroler analog industri.
Klasifikasi kontroler analog industri. Kontroler analog industri dapat diklasifikasikan sesuai dengan aksi pengontrolannya sebagai berikut
1. Kontroler dua posisi atau “on-off”
2. Kontroler proporsional
3. Kontroler integral
4. Kontroler proporsional ditambah integral
5. Kontroler proporsional ditambah turunan
6. Kontroler proporsional ditambah turunan ditambah integral
Sebagian besar kontroler di industri menggunakan listrik atau fluida-tekan seperti minyak atau udara sebagai sumber daya. Kontroler otomatis juga dapat diklasifikasikan sesuai dengan jenis daya yang digunakan dalam operasi, seperti kontroler pneumatik, kontroler hidrolika, atau kontroler elektronik. Jenis apa yang harus digunakan diputuskan berdasarkan sifat “plant” dan kondisi kerja mencakup beberapa pertimbangan seperti keamanan, biaya, ketersediaan, keandalan, ketelitian, berat, dan ukuran.
Kontroler otomatis, aktuator, dan sensor (elemen pengukur).
Gambar 1 adalah diagram blok dari sistem kontrol industri, yang terdiri dari kontroler otomatis, aktuator, “plantt, dan sensor (elemen pengukur). Kontroler mendeteksi sinyal kesalahan aktuasi, yang biasanya mempunyai tingkat daya sangat rendah, dan memperkuatnya menjadi tingkat yang tingginya mencukupi. (Jadi kontroler otomatis terdiri dari detektor kesalahan dan penguat atau amplifier. Seringkali rangkaian umpan balik yang sesuai, bersama dengan penguat, digunakan untuk mengubah sinyal kesalahan aktuasi dengan memperkuat dan kadang-kadang dengan diferensiasi dan atau integrasi untuk menghasilkan sinyal control yang lebih baik). Aktuator adalah alat yang menghasilkan masukan ke “plant” sesuai dengan sinyal kontrol sedemikian sehingga sinyal umpan balik akan berkaitan dengan sinyal masukan acuan. Keluaran dari kontroler otomatis dimasukkan ke aktuator, seperti misalnya motor atau katup pneumatic, motor hidrolika, atau motor listrik.
Sensor atau elemen pengukur adalah alat yang mmgubah variabel keluaran menjadi variable yang sesuai, seperti perpindahan, tekanan, atau tegangan, yang dapat digunakan untuk membandingkan keluaran dengan sinyal masukan acuan. Elemen ini berada pada jalur umpan balik dari sistem loop tertutup. Titik “set” dari kontroler harus diubah kemasukan acuan dengan unit yang sama dengan sinyal umpan balik dari sensor atau elemen pengukur.

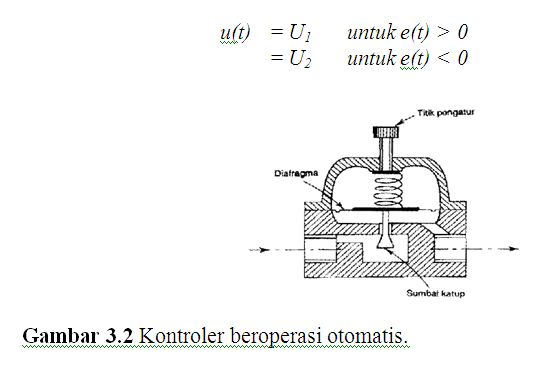
Kontroler beroperasi otomatis. Kebanyakan kontroler otomatis industri, dipisahkan unit-unit sebagai elemen pengukur dan actuator. Dalam kasus yang sangat sederhana seperti kontroler beroperasi otomatis elemen-elemennya disusun dalam satu unit. Kontroler beroperasi menggunakan daya dari elemen pengukur dan sangat sederhana serta murah. Suatu contoh kontroler beroperasi otomatis dituniukan pada Gambar 3.2. Titik ditentukan dengan mengatur gaya pegas. Tegangan kontrol diukur dengan suatu diafragma. Sinyal pembangkit kesalahan adalah gaya yang beraksi pada diafragma. Posisi diapragma ini ditentukan oleh pembuka katup.
Operasi dari kontrol beroperasi otomatis adalah sebagai berikut : Anggap tegangan keluaran lebih rendah dari tegangan acuan, seperti ditentukan oleh titik set. Selanjutnya gaya pegas ke bawah lebih rendah dari gaya tekan ke atas, menyebabkan gerak ke bawah pada diapragma. Hal ini meningkatkan laju aliran dan tekanan keluaran. Apabila gaya tekan ke atas sama dengan gaya pegas ke bawah maka katup tetap dan laju aliran tetap. Sebaliknya apabila tekanan keluaran lebih besar dari tekanan acuan, katup membuka kecil dan menurunkan laju aliran yang melalui katup pembuka. Suatu kontroler beroperasi sendiri lebih banyak digunakan untuk kontrol tekanan air maupun gas.Aksi kontrol. Berikut enam aksi kontrol dasar yang biasa digunakan pada kontroler analog industri: aksi kontrol dua posisi atau on-off, proporsional integral, proporsional ditambah integral, proporsional ditambah turunan dan proporsional ditambah integral ditambah turunan. Keenam aksi kontrol ini akan dibicarakan pada bab ini. Perhatikan bahwa pengetahuan karakteristik dasar berbagai aksi kontrol sangat penting bagi ahli kontrol untuk memilih yang terbaik dan paling cocok untuk penggunaannya.
Aksi kontrol dua posisi atau on-off. Dalam sistem kontrol dua posisi, elemen pembangkit hanya mempunyai dua posisi tertentu yaitu on dan off. Kontrol 2 posisi atau on-off relatif sederhana dan tidak mahal dan dalam hal ini sangat banyak digunakan dalan sistem kontrol industri maupun domestik.
Ambil sinyal keluaran dari kontroler u(t) tetap pada salah satu nilai maksimum atau minimum tergantung apakah sinyal pembangkit kesalahan positif atau negatif, sehingga

Gambar 3.3(a) Diagram blok kontroler on-off; (b) dagram blok kontroler on-off dengan jurang diferensial
dengan U1 dan U2 konstan. Nilai minimum U2, biasanya nol atau –U1. Kontroler dua posisi umumnya merupakan perangkat listrik dan sebuah katup yang dioperasika dengan selenoida. Kontroler pneumatik proporsional dengan penguatan yang sangat tinggi beraksi sebagai kontroler dua posisi dan kadang-kadang disebut kontroler pneumatik dua posisi.Gambar 3.3(a) dan (b) menunjukkan diagram blok kontroler dua posisi. Daerah dengan sinyal pembangkit kesalahan yang digerakkan sebelum terjadi switching disebut jurang diferensial. Jurang diferensial ditunjukkan pada Gambar 3.3(b). Suatu jurang diferensial menyebabkan keluaran kontroler u(t) tetap pada nilai awal sampai sinyal pembangkit kesalahan telah bergerak mendekati nilai nol. Dalam beberapa kasus jurang diferensial terjadi sebagai akibat adanya penghalang yang tidak dikehendaki dan gerakan yang hilang, sering juga hal ini dimaksudkan untuk mencegah operasi yangberulang-ulang dari meikanisme on-off.
Tinjau sistem kontrol tingkat cairan pada Gambar 3.4(a) dengan katup elektromagnet seperti pada Gambar 3.4(b) digunakan untuk mengontrol laju aliran masuk. Katup ini bisa dalam posisi terbuka atau tertutup. Dengan sistem koltrol dua posisi ini, laju aliran masuk dapat positif, tetap, atau nol. Seperti pada Gambar 3.5, sinyal keluaran secara terus-menerus bergerak antara dua batas yang diperlukan untuk membuat elemen pembangkit bergerak dari satu posisi ke posisi lainnya. Perhatikan bahwa kurva keluaran berikut mengikuti satu dari dua kurva eksponensial, satu berhubungan dengan kurva pengisian dan satu kurva pengosongan. Osilasi keluaran antara dua batas merupakan karakteristik tanggapan khusus dari sistem kontrol dua posisi.

Gambar 3.5 Kurva tinggi h(t) versus t untuk sistem pada Gambar 3.4(a).
Dari Gambar 3.5, kita ketahui bahwa amplitudo osilasi keluaran dapat direduksi dengan mengurangi jurang diferensial. Pegurangan jurang diferensial menambah nilai penghubung on-off per menit dan mengurangi waktu hidup komponen.
Besaran jurang diferensial harus ditentukan dari pengamatan seperti ketepatan yang diperlukan dan waktu hidup komponennya.
Aksi kontrol proporsional. Untuk kontroler dengan aksi kontrol proporsional, hubungan antara masukan kontroler u(t) dan sinyal pembangkit kesalahan e(t) adalah
Dari Gambar 3.5, kita ketahui bahwa amplitudo osilasi keluaran dapat direduksi dengan mengurangi jurang diferensial. Pegurangan jurang diferensial menambah nilai penghubung on-off per menit dan mengurangi waktu hidup komponen.
Besaran jurang diferensial harus ditentukan dari pengamatan seperti ketepatan yang diperlukan dan waktu hidup komponennya.
Aksi kontrol proporsional. Untuk kontroler dengan aksi kontrol proporsional, hubungan antara masukan kontroler u(t) dan sinyal pembangkit kesalahan e(t) adalah

Apapun mekanisme sebenarnya dan apapun bentuk gaya operasi kontroler proporsional pada dasarnya suatu penguat dengan penguatan yang dapat disetel. Diagram blok kontroler ini ditunjukkan pada Gambar 3.6.
Aksi kontrol integral. Pada kontroler dengan aksi kontrol integral nilai masukan kontroler u(t) diubah pada laju proporsional dari sinyal pembangkit kesalahan e(t). Sehingga
Aksi kontrol integral. Pada kontroler dengan aksi kontrol integral nilai masukan kontroler u(t) diubah pada laju proporsional dari sinyal pembangkit kesalahan e(t). Sehingga


atau fungsi alih kontroler ini adalah


dengan Kp adalah penguatan proporsional dan Td konstanta yang disebut waktu turunan. Kp dan Td keduanya dapat ditentukan. Aksi kontrol turunan kadang-kadang disebut laju kontrol dengan besaran keluaran kontroler proporsional ke laju perubahan sinyal pembangkit kesalahan. Waktu turunan Td adalah watku interval dengan laju aksi memberikan pengaruh pada aksi kontrol proporsional. Gambar 3.9(a) menunjukkan diagram blok kontroler proporsional ditambah turunan. Jika sinyal pembangkit kesalahan e(t) unit fungsi landai seperti dituniukkan pada Gambar 3.9(b), maka keluaran kontroler menjadi seperti pada Gambar 3.9(c). Seperti dapat dilihat pada Gambar 3.9(c), aksi kontrol turunan mempunyai karakter antisipasi. Namun demikian, aksi kontrol turunan tidak dapat mengantisipasi aksi lain yang belum pernah dilakukan.
Satu pihak aksi kontrol mempunyai keuntungan mengantisipasi, tapi di pihak lain juga mempunyai kelemahan yaitu adanya gangguan sinyal penguatan yang dapat bercampur pada pembangkit (aktuator).
Perhatikan bahwa aksi kontrol turunan tidak pemah digunakan sendiri karena aksi kontrol ini hanya efektif selama periode transient.
Aksi kontrol proporsional ditambah integral ditambah turunan. Kombinasi dari aksi kontrol proporsional, aksi kontrol integral, dan aksi kontrol turunan disebut aksi kontrol proporsional ditambah integral ditambah turunan. Kombinasi ini mempunyai keuntungan dibanding masing-masing kontroler.
Persamaan dengan tiga kombinasi ini diberikan oleh
Satu pihak aksi kontrol mempunyai keuntungan mengantisipasi, tapi di pihak lain juga mempunyai kelemahan yaitu adanya gangguan sinyal penguatan yang dapat bercampur pada pembangkit (aktuator).
Perhatikan bahwa aksi kontrol turunan tidak pemah digunakan sendiri karena aksi kontrol ini hanya efektif selama periode transient.
Aksi kontrol proporsional ditambah integral ditambah turunan. Kombinasi dari aksi kontrol proporsional, aksi kontrol integral, dan aksi kontrol turunan disebut aksi kontrol proporsional ditambah integral ditambah turunan. Kombinasi ini mempunyai keuntungan dibanding masing-masing kontroler.
Persamaan dengan tiga kombinasi ini diberikan oleh







No comments:
Post a Comment